


知能機械研究室福田 靖 教授
- 研究のキーワード
- 歩行ロボット
- コミュニケーション・ロボット
- サイボーグ
- 人間-機械共存技術


知能機械研究室では、歩行ロボットの歩き方、ロボットによるコミュニケーション機能、ロボットと生体が融合したサイボーグ技術など、ロボットの機構・制御に関する研究を行っています。
4足歩行ロボット
馬や犬などの動物は、凹凸や段差のある地面を自由に歩くことができます。これは、動物が歩行のルールに従い、4脚を協調して歩行するからです。馬や犬がどうやって歩いているかを調べながら、4足ロボットの脚機構や歩行制御について研究しています。

4足歩行型法面作業ロボット
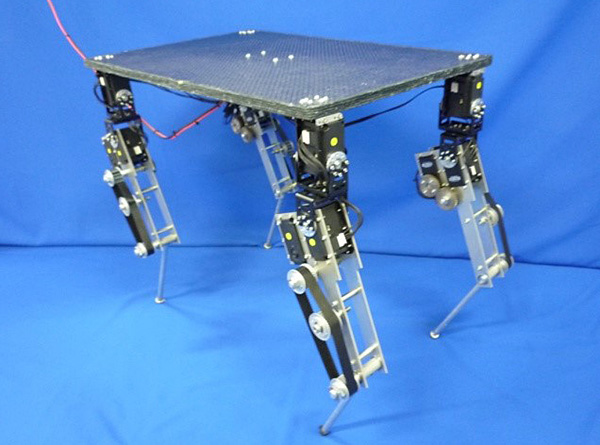
4足ロボット・モデル
- 高速で疾走する4足歩行ロボットの開発
- 動歩行、遷移歩容、対地適応歩容など歩行運動制御
- 動物を規範とした脚機構や歩行制御
ロボット・スーツ
人間の様々な動作を再現するためのロボット・スーツを開発しています。
センサーを備えた「身体機能トレース用ロボット・スーツ」で様々な動作を記録し、そのデータを元にモータを備えた「運動再現用ロボット・スーツ」でその動作を再現します。人間の身体の動作を記録・再現するためには、人間に近い自由度が必要となります。
ロボット・スーツを通じて、スポーツ競技や楽器演奏で身体を動かすコツを学ぶことができるようになります。また、伝統芸能や製造現場での熟練技術の記録・伝承が可能になります。

身体機能トレース用ロボット・スーツ

運動再現用ロボット・スーツ
- トレース用ロボット・スーツの開発
- 運動再現用ロボット・スーツの開発
- ロボット・スーツを用いた様々な動作の記録・再現実験
コミュニケーション・ロボット

(開発中)
将来、ロボットが人間の生活を支援してくれるような時代がやって来ると言われていますが、そのためには、ロボットと人間のコミュニケーションが重要な役割を果たします。そこで、ロボットが、会話や顔表情、身振り・手振りなどボディー・ランゲージを用いてコミュニケーションを行う方法について研究しています。
- ボディー・ランゲージを用いた感情、意思の表現
- 会話とボディー・ランゲージの協調
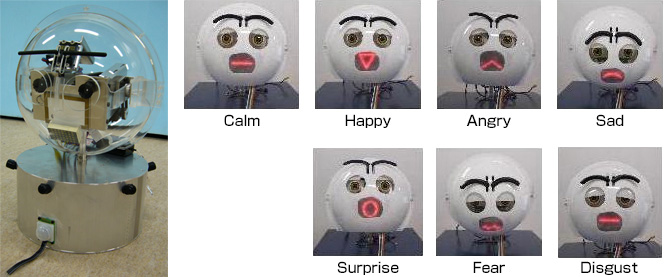
顔表情ロボットと表情
車輪型移動ロボット
人の居る家庭、オフィス、店内などの実環境において、車輪型移動ロボットが人と衝突することなく移動するための認識技術や衝突を回避するための移動制御技術について研究しています。
- 移動物体の衝突回避に関する研究
- 段差などに対応可能な走行ロボットの移動機構の研究
- 学科紹介